Payam Parvizi
I am a PhD-trained Research Associate with 4+ years of experience developing and validating reinforcement learning methods for continuous control under real-world-motivated constraints. I am driven by a deep curiosity about how learning-based controllers can achieve the smooth, stable, and reliable behavior needed for safe deployment in physical systems.
I specialize in action/policy regularization and policy smoothing to reduce high-frequency oscillations and improve reliability, validated through the development of custom Gymnasium-compatible environments and simulation-to-real transfer. My work includes deployment on quadcopter platforms and applications in satellite-to-ground optical communications, conducted at the University of Ottawa under the supervision of Dr. Davide Spinello and Dr. Colin Bellinger, and in collaboration with Dr. Ross Cheriton at the National Research Council of Canada (NRC).
CV
Google Scholar
GitHub
LinkedIn
Email

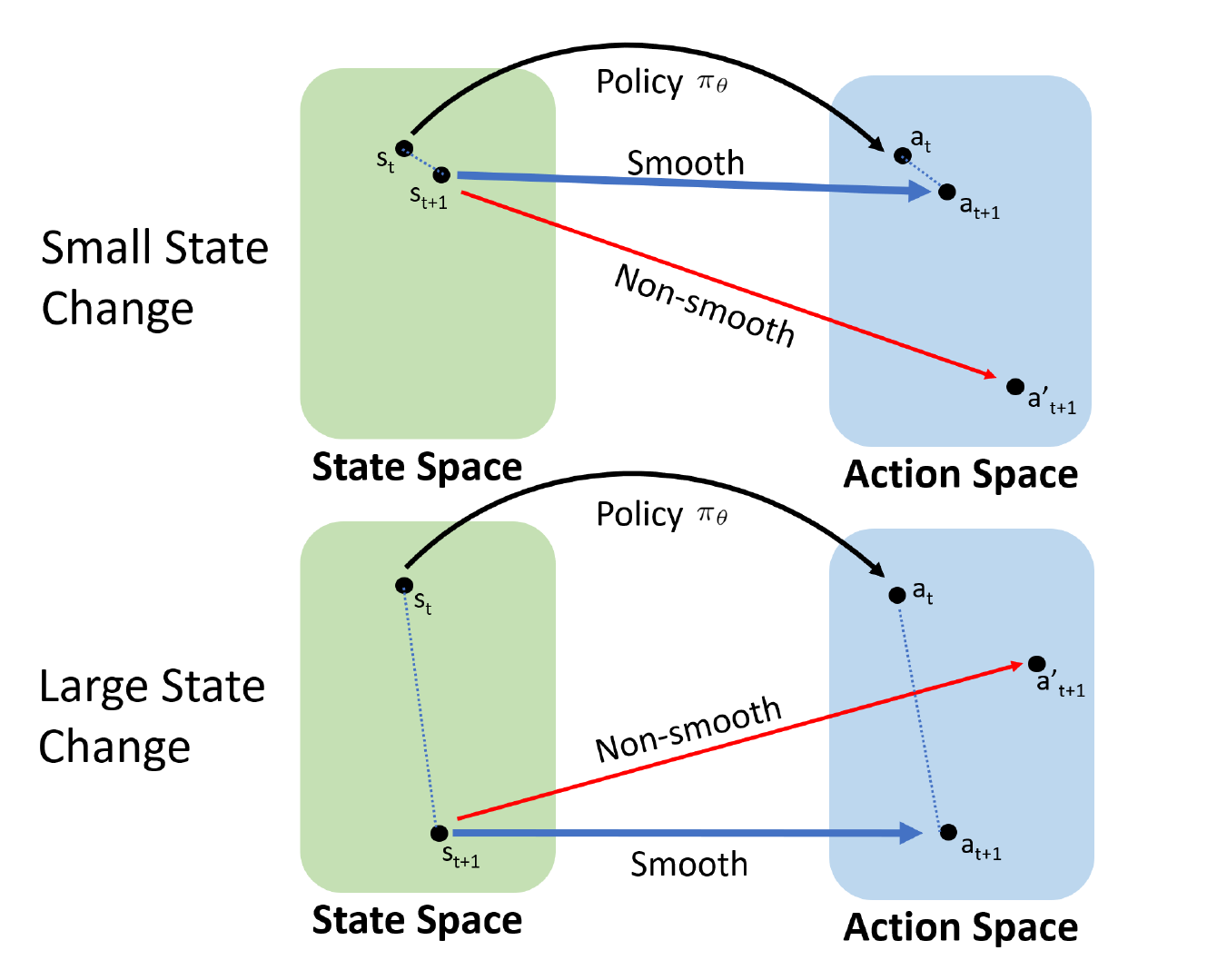
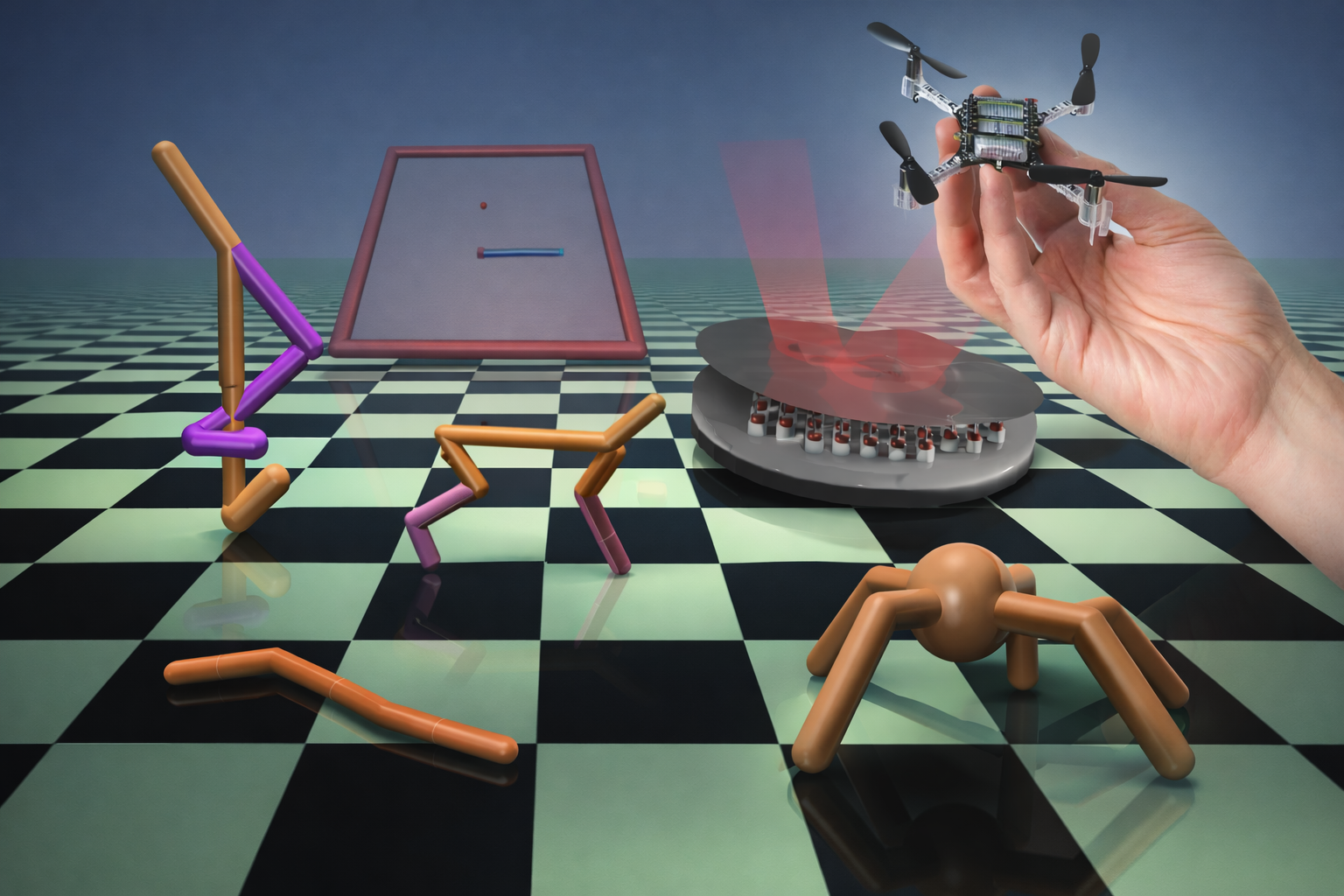
Adaptive Policy Regularization for Smooth Control in Reinforcement Learning
This work introduces State-Adaptive Proportional Policy Smoothing (SAPPS), a lightweight
policy regularization method that suppresses high-frequency action oscillations in continuous-control
reinforcement learning while preserving responsiveness to rapid state changes.
The method is validated across MuJoCo benchmarks, an adaptive optics system, and sim-to-real quadcopter experiments.
PhD research conducted at the University of Ottawa
in collaboration with the National Research Council of Canada (NRC).
Sim-to-Real Reinforcement Learning for Quadrotor Control
This work develops a sim-to-real reinforcement learning framework for quadrotor control
using the Proximal Policy Optimization (PPO). A training is designed
for both simulation and real-world deployment on the Crazyflie 2.1 nano-quadrotor,
enabling stable hovering control.
[Code]
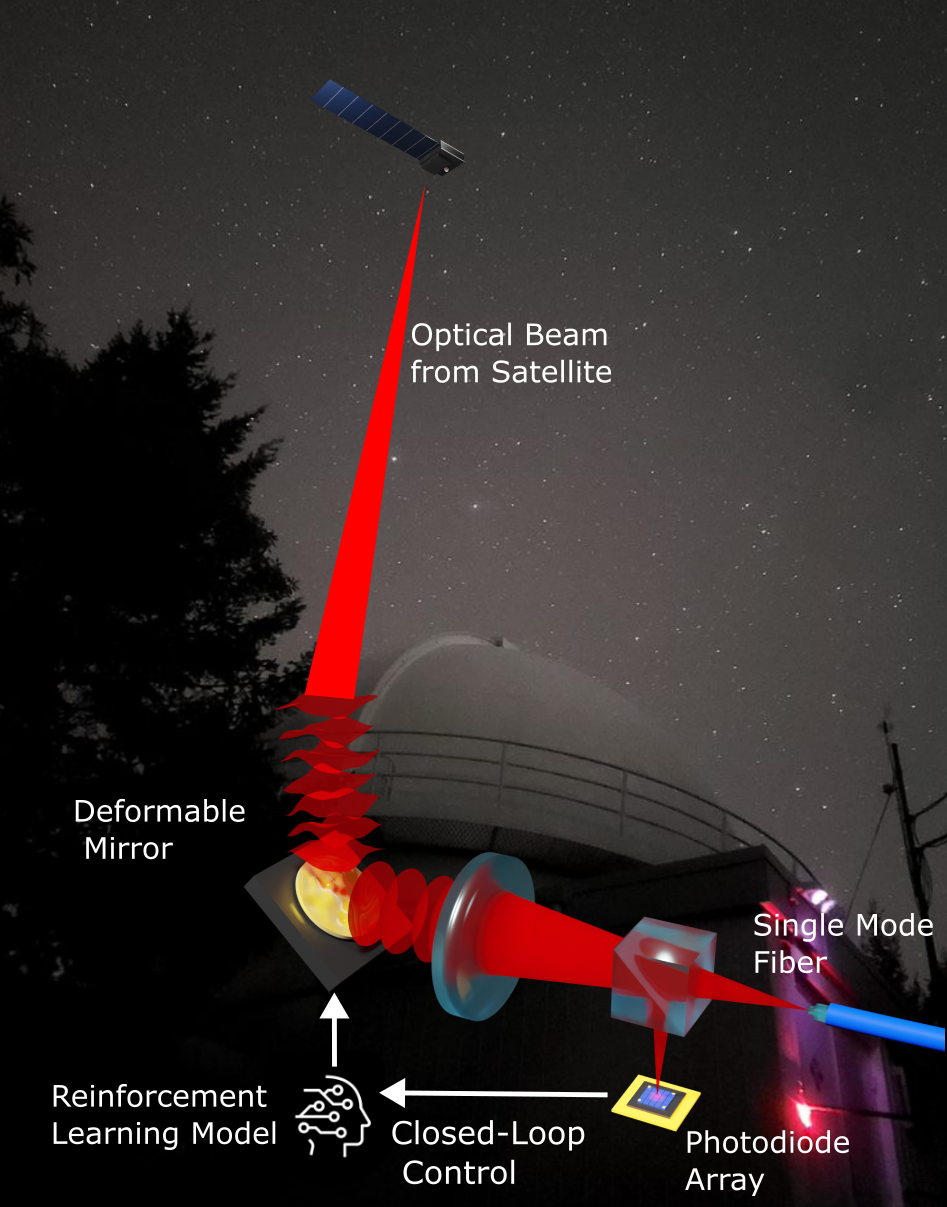
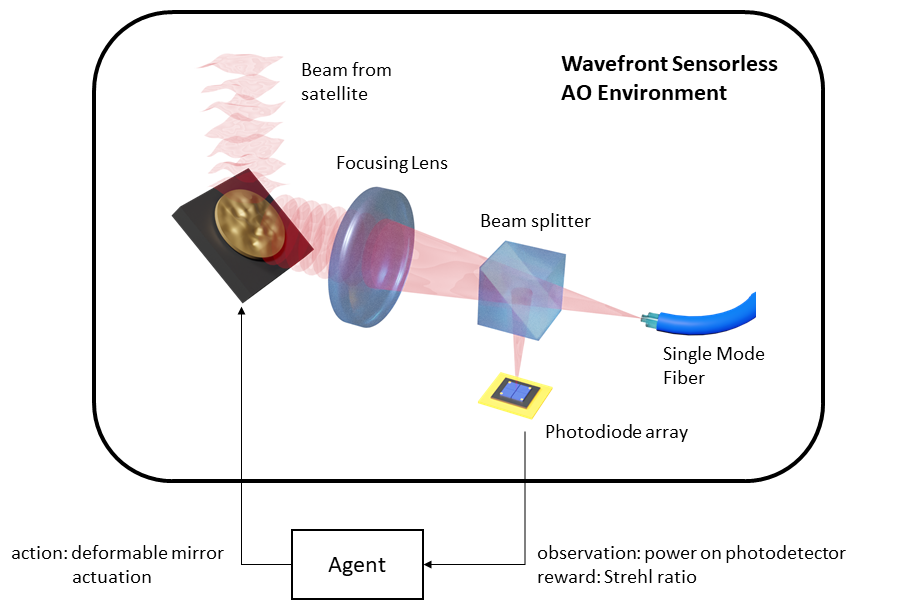
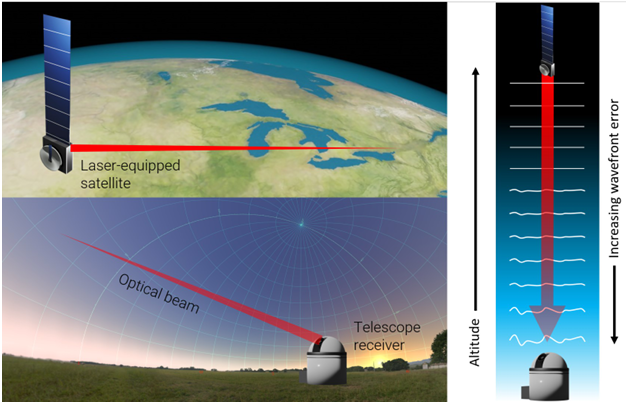
Reinforcement Learning for Wavefront Sensorless Adaptive Optics
This work develops a simulated wavefront sensorless adaptive optics (AO) reinforcement learning (RL) environment for
training and evaluating RL algorithms. It is the first AO–RL environment implemented using the OpenAI Gymnasium
framework, enabling reproducible benchmarking and analysis. The work also demonstrates, for the first time,
the potential of reinforcement learning for wavefront sensorless AO in satellite communication downlinks.
PhD research conducted in collaboration with the
National Research Council of Canada (NRC).
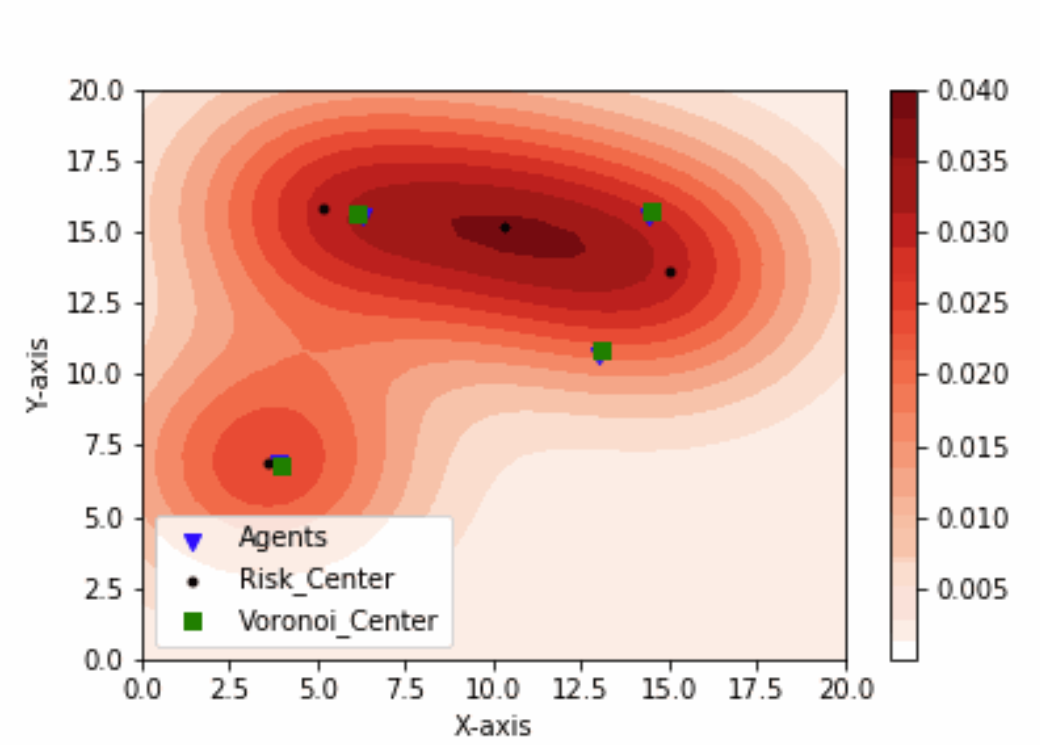
Multi-Robot Area Coverage Control with Repulsive Risk Density
This work formulates an area coverage control problem for multi-agent systems operating under
partial environmental information. Mobile targets are modeled as risk sources, and the risk
density is incorporated directly into the agent dynamics as a repulsive term, enabling online
motion planning in service robotics applications.
PhD Research in Multi-Robot Area Coverage, supervised by
Dr. Davide Spinello
at University of Ottawa.
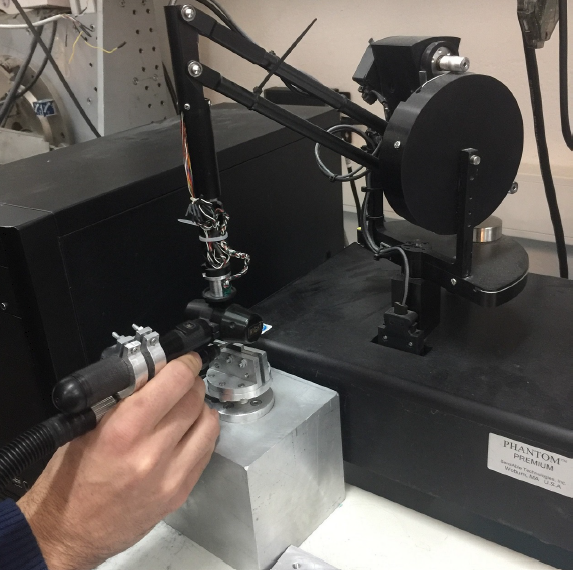
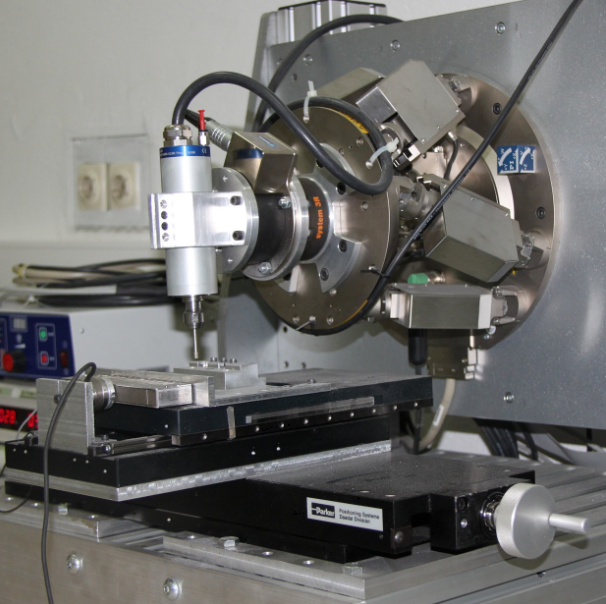
Robotic Deburring via Learning from Demonstration
This work presents a learning-from-demonstration approach for robotic deburring of
workpieces with unknown shapes. Task-relevant motions of a human expert were recorded
using a 6-DOF haptic device and encoded using augmented
Dynamic Movement Primitives (DMPs) to generate adaptable deburring trajectories.
M.Sc. research, part of the
“Development of a High-Precision Hybrid Robotic Deburring System”
project funded by TÜBİTAK.
Adaptive Policy Regularization for Smooth Control in Reinforcement Learning
Payam Parvizi, Abhishek Naik, Colin Bellinger, Ross Cheriton, Davide Spinello
Authorea, 2026. Submitted to IEEE Transactions on Automation Science and Engineering
Paper •
Code
Adaptive Policy Smoothing in Reinforcement Learning: Applications to Wavefront Sensorless Adaptive Optics and Robotics
Payam Parvizi
Ph.D. Thesis, University of Ottawa, 2025
Ph.D. Thesis
Action-Regularized Reinforcement Learning for Adaptive Optics in Optical Satellite Communication
Payam Parvizi, Colin Bellinger, Ross Cheriton, Abhishek Naik, Davide Spinello
Optica Open, 2025. In final production at Journal of the Optical Society of America B (Optica)
Paper •
Code
Reinforcement Learning Environment for Wavefront Sensorless Adaptive Optics in Single-Mode Fiber-Coupled Optical Satellite Communications Downlinks
Payam Parvizi, Runnan Zou, Colin Bellinger, Ross Cheriton, Davide Spinello
Photonics, vol. 10, no. 12, 2023 (MDPI)
Paper •
Code
Wavefront Sensorless Adaptive Optics for Free-Space Satellite-to-Ground Communication Using Reinforcement Learning
Runnan Zou, Payam Parvizi, Ross Cheriton, Colin Bellinger, Davide Spinello
COAT 2023
Paper
Demonstration of Robotic Deburring Process Motor Skills from Motion Primitives of Human Skill Model
Payam Parvizi
M.Sc. Thesis, Middle East Technical University (METU), 2018
M.Sc. Thesis
Dynamic Movement Primitives and Force Feedback: Teleoperation in Precision Grinding Process
Kemal Açıkgöz, Payam Parvizi, Abdulhamit Dönder, Musab Çağrı Uğurlu, Erhan İlhan Konukseven
IEEE International Conference on Electrical and Electronics Engineering (ELECO), 2017
Paper
Parametrization of Robotic Deburring Process with Motor Skills from Motion Primitives of Human Skill Model
Payam Parvizi, Musab Çağrı Uğurlu, Kemal Açıkgöz, Erhan İlhan Konukseven
IEEE International Conference on Methods and Models in Automation and Robotics (MMAR), 2017
Paper
2025
Poster Presentation — Photonics North (Ottawa, Canada)2023
Poster Presentation — Technology for the Digital Transformation of Society, University of OttawaWork Experience
-
Research Associate, University of Ottawa (Nov. 2025 – Present)
-
Research Assistant, University of Ottawa & NRC (Apr. 2022 – Sept. 2025)
-
Teaching Assistant, University of Ottawa (Jan. 2019 – Apr. 2022)
-
Project Assistant, Middle East Technical University & TÜBİTAK (Nov. 2015 – Nov. 2017)
-
R&D Intern, Mercedes-Benz Türk Inc. (Jun. 2013 - Aug. 2013)
-
Maintenance Engineering Intern, Turkish Airlines Technic (Jan. 2012 - Mar. 2012)
Education
-
Ph.D. in Mechanical Engineering, University of Ottawa (2025)
-
M.Sc. in Mechanical Engineering, Middle East Technical University (2018)
-
B.Sc. in Aerospace Engineering, Middle East Technical University (2014)
Teaching Experience
- MCG 3307: Control Systems (Winter 2019, 2020, 2021 & 2022)
- MCG 3306: System Dynamics (Fall 2020 & 2021)
- MCG 3305: Biomedical System Dynamics (Fall 2019)
Certifications
-
MITx MicroMasters — Statistics and Data Science (2019 - 2020)
- Machine Learning with Python
- Fundamentals of Statistics
- Probability